
Zih-Sing Fu*, Peter Zhi Xuan Li*, Sertac Karaman, Vivienne Sze
*Equal Contribution
IEEE Symposium on VLSI Circuits (VLSI-Circuits) 2026
Gleanmer is a tiny, 6 milliwatt chip that builds detailed 3D maps of its surroundings in real time, bringing high fidelity spatial awareness to battery powered devices like insect scale robots and AR/VR headsets.

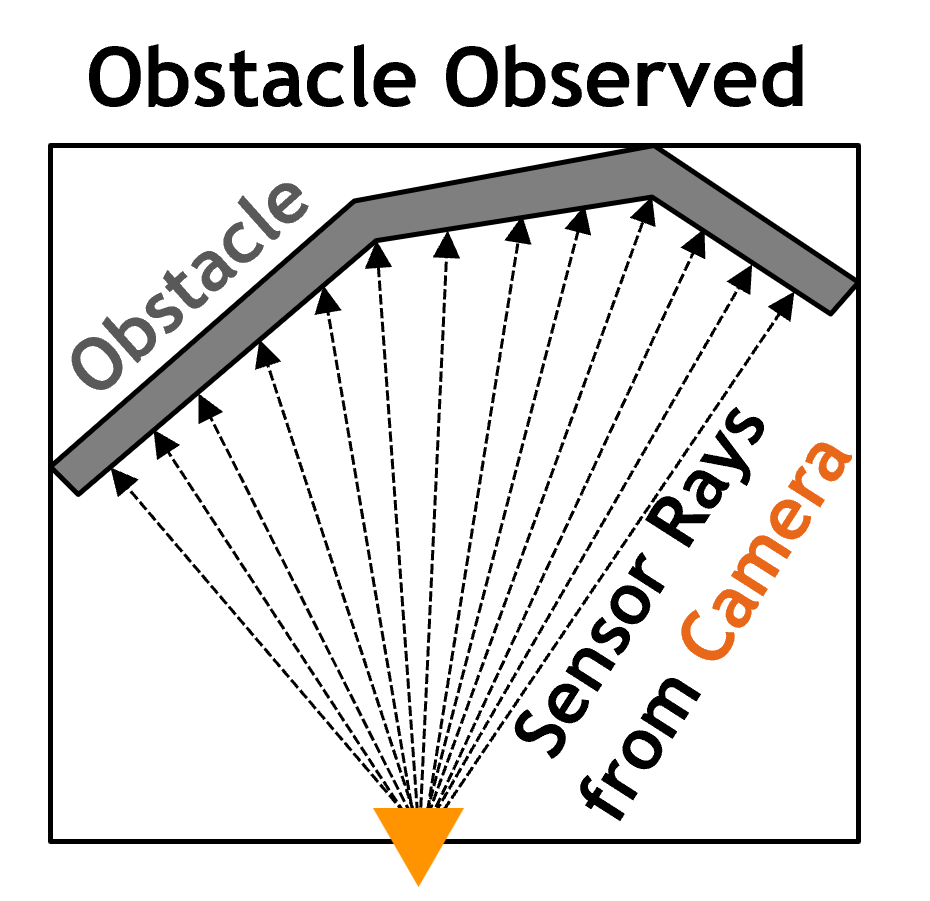
Many edge applications require mapping: the process of building a spatial representation of an environment from sensor rays.
Consider a 2D example: a camera emits sensor rays that land on the surfaces of obstacles. Each ray's endpoint marks an occupied surface, the ray's path marks free space, and anything beyond the endpoint is unexplored.
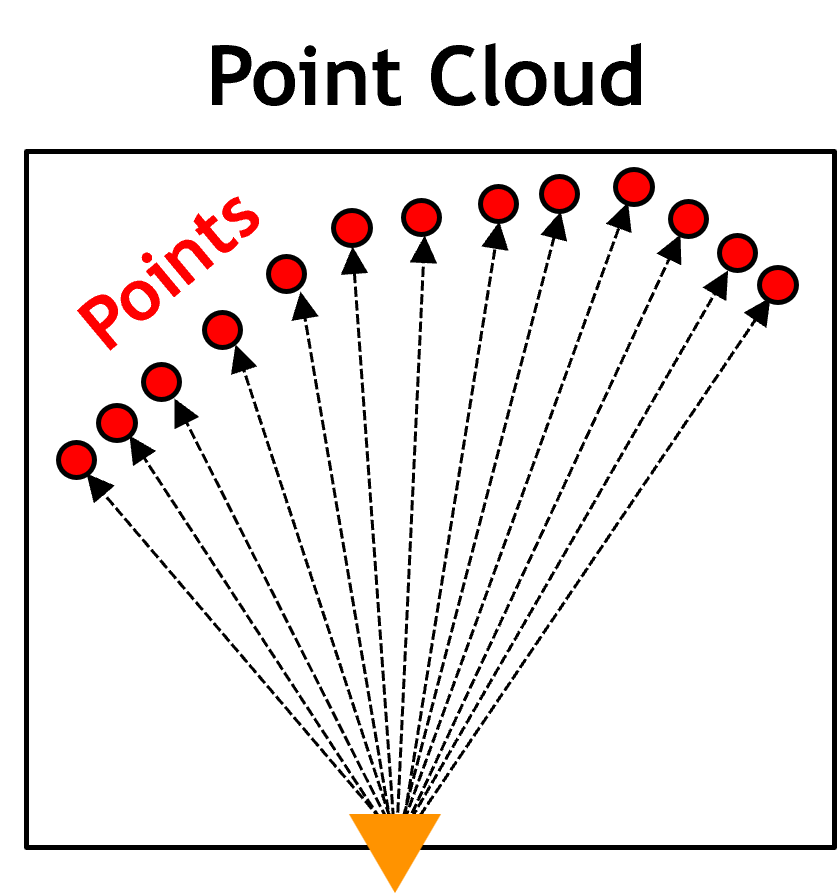
The more commonly known point cloud keeps only those endpoints, shown as red dots. It records part of the occupied surface but discards the free and unexplored space, so it is incomplete.
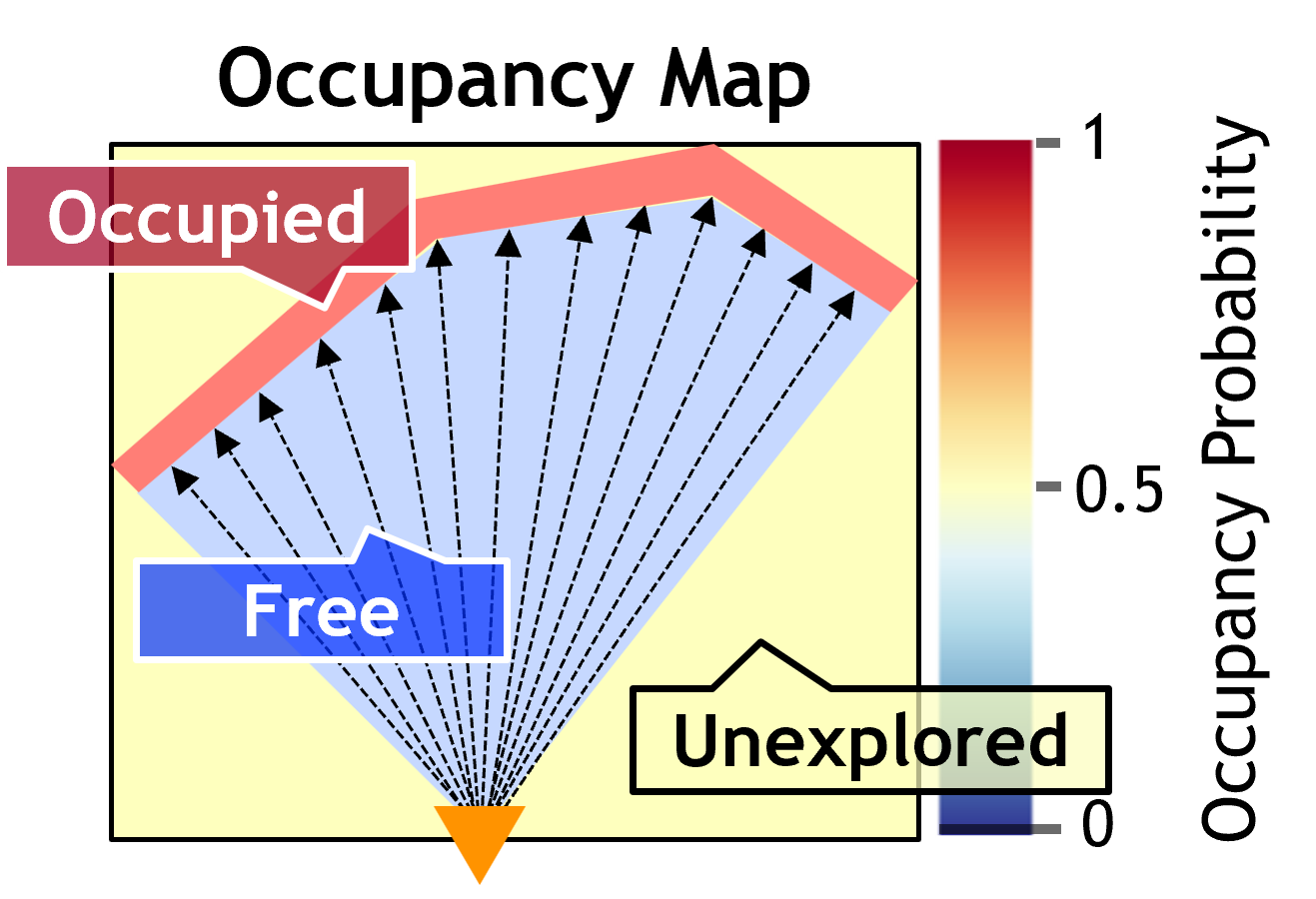
An occupancy map instead captures all three regions: occupied, free, and unexplored. This complete representation, especially the free space, is what a robot needs to plan a safe path.
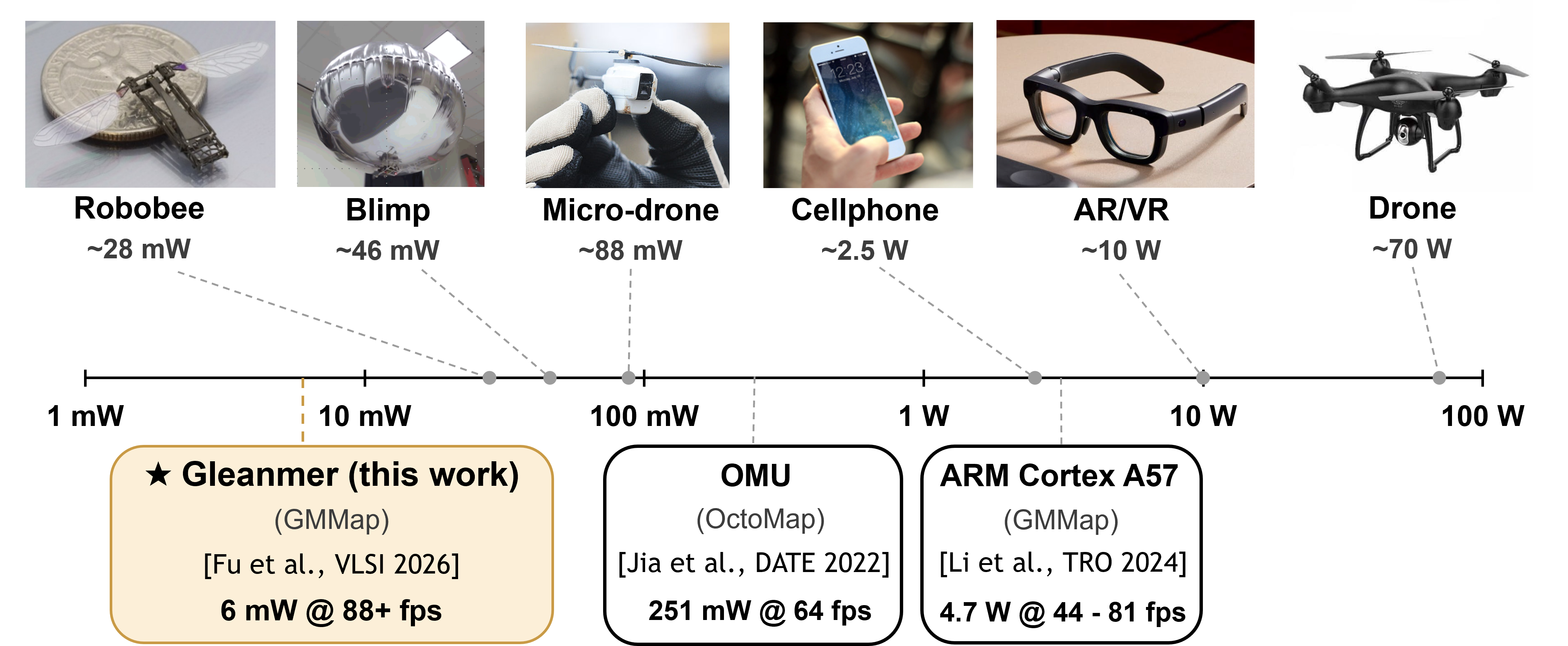
A whole range of devices needs to understand the 3D space around them, from insect scale robots, blimps, and micro drones that draw only tens of milliwatts, up to cellphones, AR/VR headsets, and drones that draw watts. Power is the binding constraint.
Existing solutions cannot reach the low end of that spectrum. Running the GMMap algorithm on an ARM Cortex A57 CPU takes more than 4 watts for near real time operation, and OMU, the prior occupancy mapping accelerator, runs voxel based OctoMap at 251 milliwatts, already beyond the budget of micro drones, blimps, and a RoboBee. At just 6 milliwatts, about the power of a single LED, Gleanmer opens the full spectrum, bringing real time occupancy mapping within reach for even insect scale platforms.
Popular mapping frameworks describe the world with millions of tiny cubes called voxels. Gleanmer instead uses Gaussians: smooth ellipsoid “blobs” whose size, shape, and orientation flex to match real surfaces. A single stretched blob can stand in for thousands of identical cubes, so both the obstacles and the free space a robot needs for a safe path are captured far more compactly.
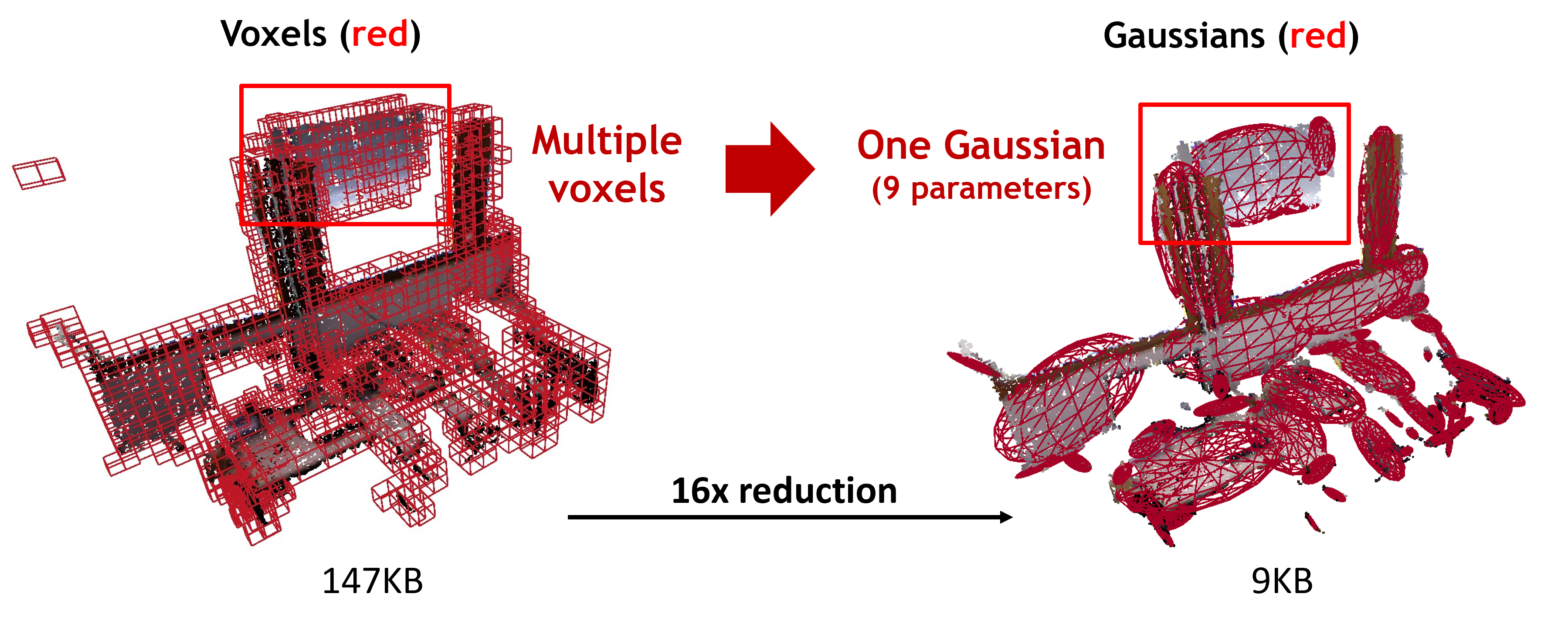
In addition to compact map storage, two key ideas keep the map construction energy efficient. First, the chip builds these Gaussians in a single pass over each camera image: assuming nearby pixels belong to the same blob, it only compares each pixel to its neighbors, then discards the image, so it only requires a few pixels in memory at any time and never stores a whole picture at once. Second, when the robot sees the same object again from a new angle, the overlapping Gaussians are merged directly, without revisiting the original pixels. Because the map is so compact, the Gaussians the chip is actively working with sit in small, fast memory right beside the processing units, and since the robot moves smoothly, the objects it needs next are usually the ones it just saw.
That is the heart of the result: through algorithm-hardware co-design, the algorithm and the chip are built together around a single shared goal of memory efficiency. By keeping the map compact and the work local, Gleanmer turns that efficiency directly into energy efficiency, reaching a level that neither the algorithm nor the chip could achieve alone.
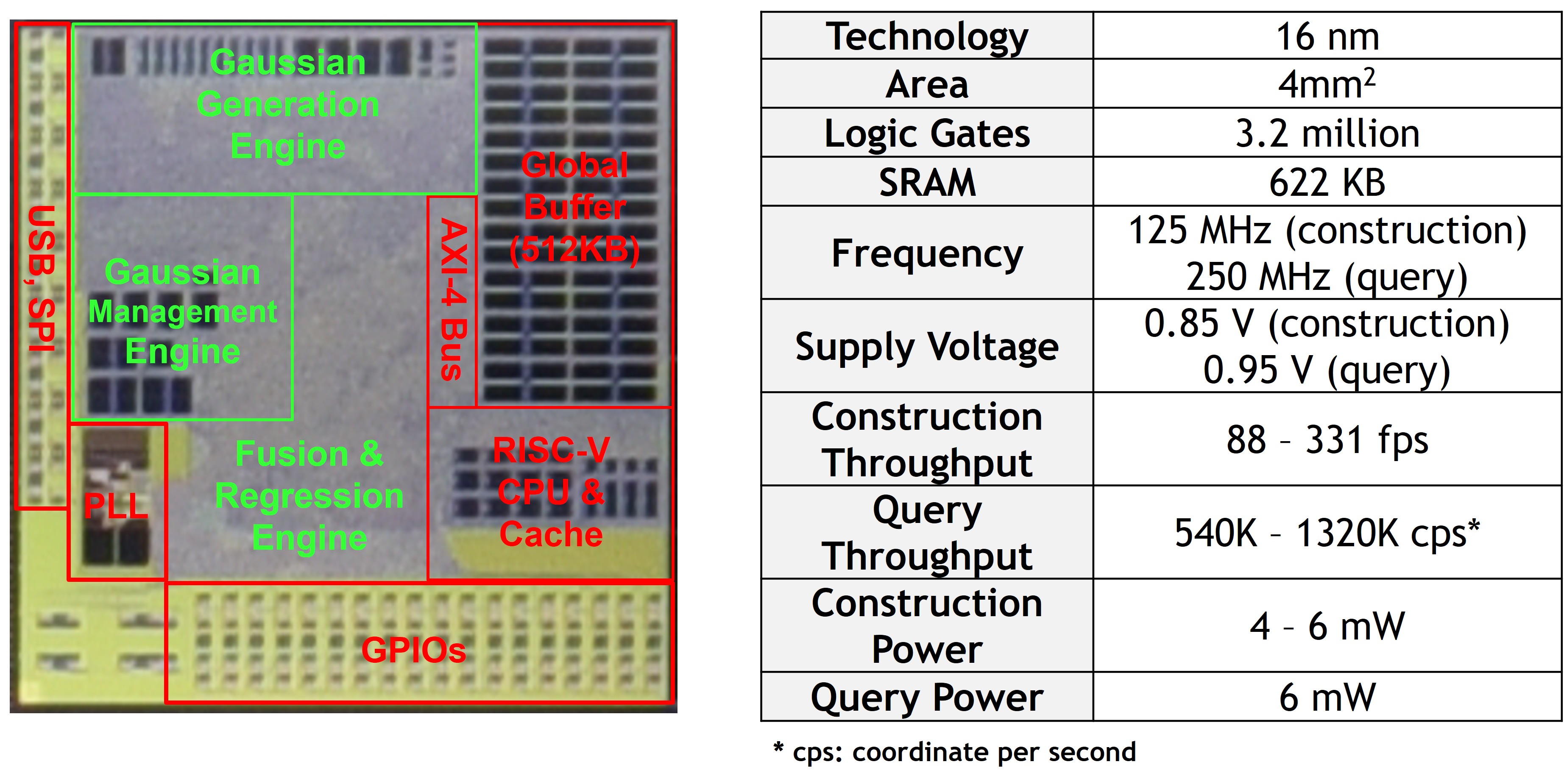
Gleanmer is fabricated in 16 nm CMOS on a 2 mm by 2 mm die with 622 KB of on chip SRAM. It builds maps at 88 to 331 frames per second and answers spatial queries at 540K to 1.3M coordinates per second, all while drawing under 6 milliwatts.
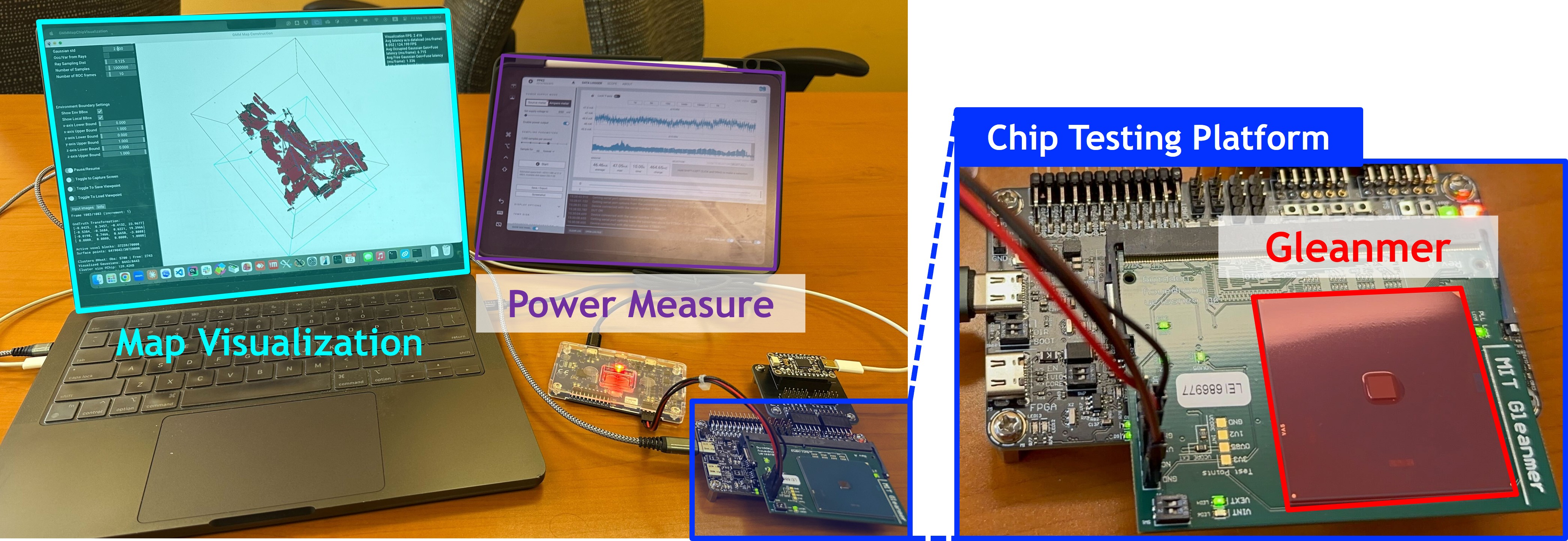
To validate the chip, a laptop streams depth images into Gleanmer, which builds a 3D occupancy map in real time on the test board.
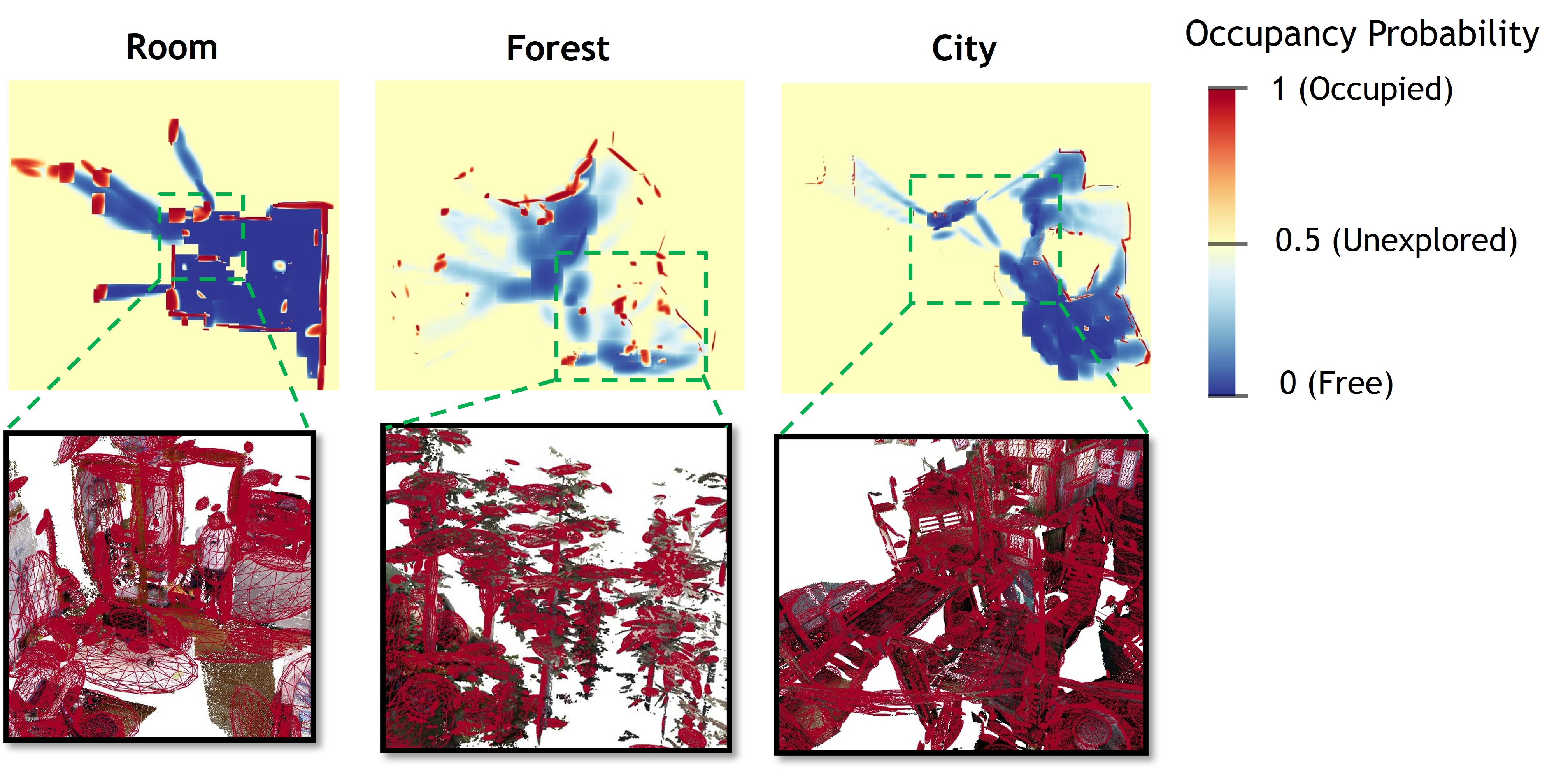
We evaluated Gleanmer on three very different environments: an indoor office room, an unstructured forest scene, and a large city scene. Across all three, it achieves greater than 96% map accuracy while shrinking the map size through reduced precision. The occupancy map of a full city block fits in under 400 KB and is constructed entirely on chip.
To put these numbers in context, we compare Gleanmer against two reference points: an NVIDIA Jetson TX2 running the same GMMap algorithm, and OMU, a prior ASIC built for OctoMap, a voxel based mapping framework.
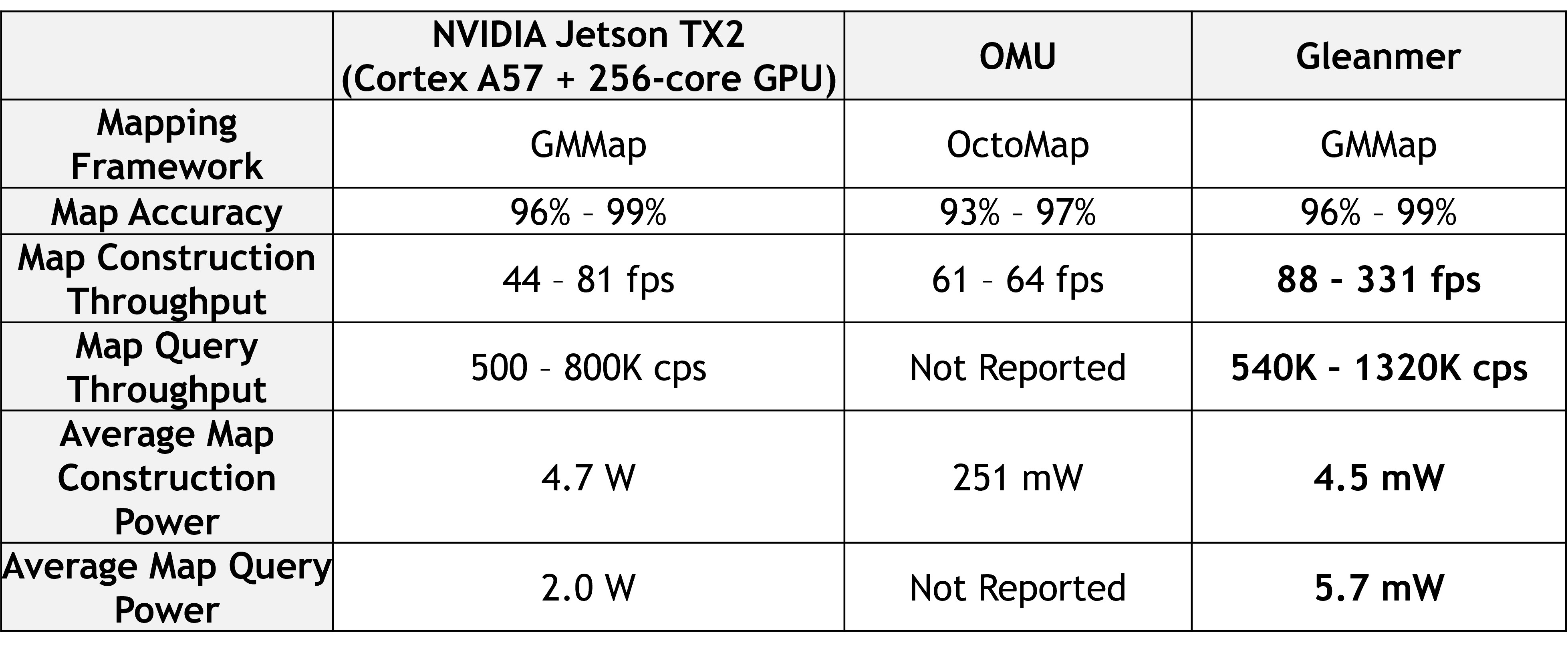
At comparable accuracy, Gleanmer consumes at least 341× less power than the Jetson TX2 and 44× less than OMU.
@inproceedings{fu2026gleanmer,
author = {Fu*, Zih-Sing and Li*, Peter Zhi Xuan and Karaman, Sertac and Sze, Vivienne},
title = {{Gleanmer: A 6 mW SoC for Real-Time 3D Gaussian Occupancy Mapping}},
booktitle = {{IEEE Symposium on VLSI Circuits (VLSI-Circuits)}},
note = {* denotes equal contribution},
year = {2026}
}
@article{li2024gmmap,
author = {Li, Peter Zhi Xuan and Karaman, Sertac and Sze, Vivienne},
title = {{GMMap: Memory-Efficient Continuous Occupancy Map Using Gaussian Mixture Model}},
journal = {{IEEE Transactions on Robotics}},
volume = {40},
pages = {1339--1355},
year = {2024}
}
Z.-S. Fu*, P. Z. X. Li*, S. Karaman, V. Sze, “Gleanmer: A 6 mW SoC for Real-Time 3D Gaussian Occupancy Mapping,” IEEE Symposium on VLSI Circuits (VLSI-Circuits), 2026. paper →
P. Z. X. Li, S. Karaman, V. Sze, “GMMap: Memory-Efficient Continuous Occupancy Map Using Gaussian Mixture Model,” IEEE Transactions on Robotics, vol. 40, pp. 1339–1355, 2024. paper →
This work was supported in part by the MIT-MathWorks Fellowship, Amazon, the National Science Foundation, and Intel.